
Toy example¶
As the name “molecular dynamics” implies, we will be following the movement/dynamics of atoms and molecules. Conventionally, these movements are created by starting at a specific configuration at time 0, and then integrating Newton’s equations of motion over time. To do so, we need two central pieces of information:
Given the current locations of particles and forces acting on the atoms, obtain the locations at the next time step
Given the current locations of particles , obtain the force
We will explore the details of both aspects in detail in different sections during the course, but will start out with simple functions to create a toy simulation in this section. Let’s start with a few definitions and derivations.
System of point particles¶
We can describe point particles using their positions , velocities , acceleration , jerk , and forces :
where (from Newton’s second equation of motion force equals mass times acceleration). For conservative force fields, we can derive that the overall energy
is always conserved, and that the force is the negative gradient of the potential energy
To be able to calculate forces from positions, we therefore need to have a function for the potential energy (which we can then take the gradient of).
A simple potential: Soft-sphere potential¶
For this toy example, we will create an artificial potential function derived from a Lennard-Jones potential
where governs the strength of the interaction and defines the length scale, with the minimum (best) energy at . We will shift the potential by up, and then remove the attrative part of the potential:
We thus end up with “soft spheres”, which repell each other in a soft manner (not like a hard, rigid repulsion), but do not attract each other at all. In this example, we will furthermore work in dimensionless units, where we choose , , and as units of lenth, masss, energy, and temperature respectively. We thus get
import numpy as np
import matplotlib.pyplot as plt
from matplotlib import animation
from IPython.display import HTMLdef lennard_jones_potential(rij):
return 4 * (rij ** (-12) - rij ** (-6))
def soft_sphere_potential(rij):
return 4 * (rij ** (-12) - rij ** (-6)) + 1
x = np.arange(0.94, 2.0, 0.02)
plt.plot(x, lennard_jones_potential(x), label="Lennard-Jones Potential")
x = np.arange(0.94, 2 ** (1 / 6), 0.02)
plt.plot(x, soft_sphere_potential(x), label="Soft-sphere Potential")
plt.legend()
plt.xlabel("Potential energy")
plt.xlabel("Interatomic distance")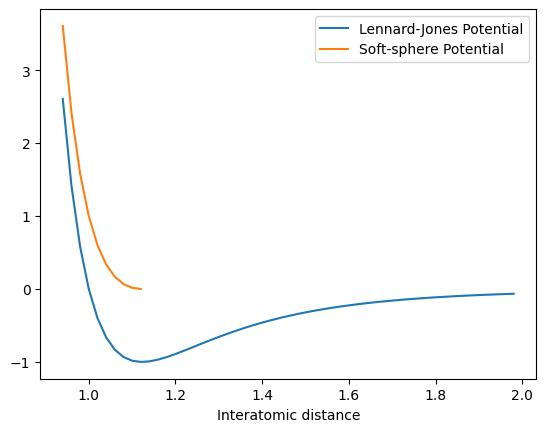
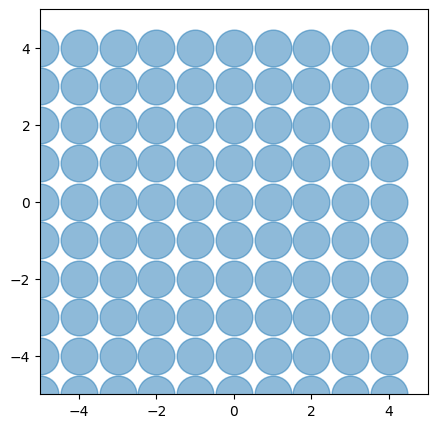
To run a simulation, we will put atoms on a regular grid and draw the velocities from a random distribution with magnitudes corresponding to a specified temperature:
def initcoords(n, l):
coords = np.zeros((n, 2))
i = 0
for x in np.arange(-l[0] / 2, l[0] / 2, l[0] / np.ceil(np.sqrt(n))):
for y in np.arange(-l[1] / 2, l[1] / 2, l[1] / np.ceil(np.sqrt(n))):
coords[i] = np.array([x, y])
i += 1
if i == n:
break
return coords
def initvels(n, temp, seed):
np.random.seed(seed)
vels = np.random.random((n, 2)) - np.ones((n, 2)) * 0.5
vels = (
vels
/ np.linalg.norm(vels, axis=1)[:, None]
* np.sqrt(temp * 2 * (1 - 1 / n))
)
vels -= np.sum(vels, axis=0) / n
return vels
def init(n, l, temp, seed):
step_count = 0
coors = initcoords(n, l)
vels = initvels(n, temp, seed)
accels = np.zeros((n, 2))
return step_count, coors, vels, accelsn = 100
l = [10,10]
temp = 2
seed = 0
rcut_squared = 2**(1/3)
dt = 0.005
fig, ax = plt.subplots(figsize=(5, 5))
step_count, coors, vels, accels = init(n, l, temp, seed)
trajectory = [coors]
ax.scatter(coors[:, 0], coors[:, 1], s=700, alpha=0.5)
ax.quiver(coors[:,0],coors[:,1],vels[:,0],vels[:,1])
ax.set(xlim=[-l[0] / 2, l[0] / 2], ylim=[-l[1] / 2, l[1] / 2])[(-5.0, 5.0), (-5.0, 5.0)]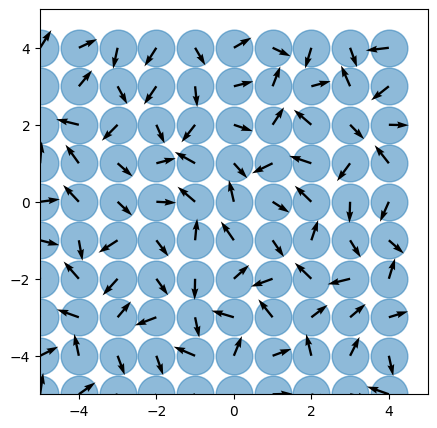
In the above plot, we see the particles in blue, their velocities as black vectors. We now need to write a function for the soft-sphere potential, as well as the negative gradient of it (the force), which can be obtained analytically as
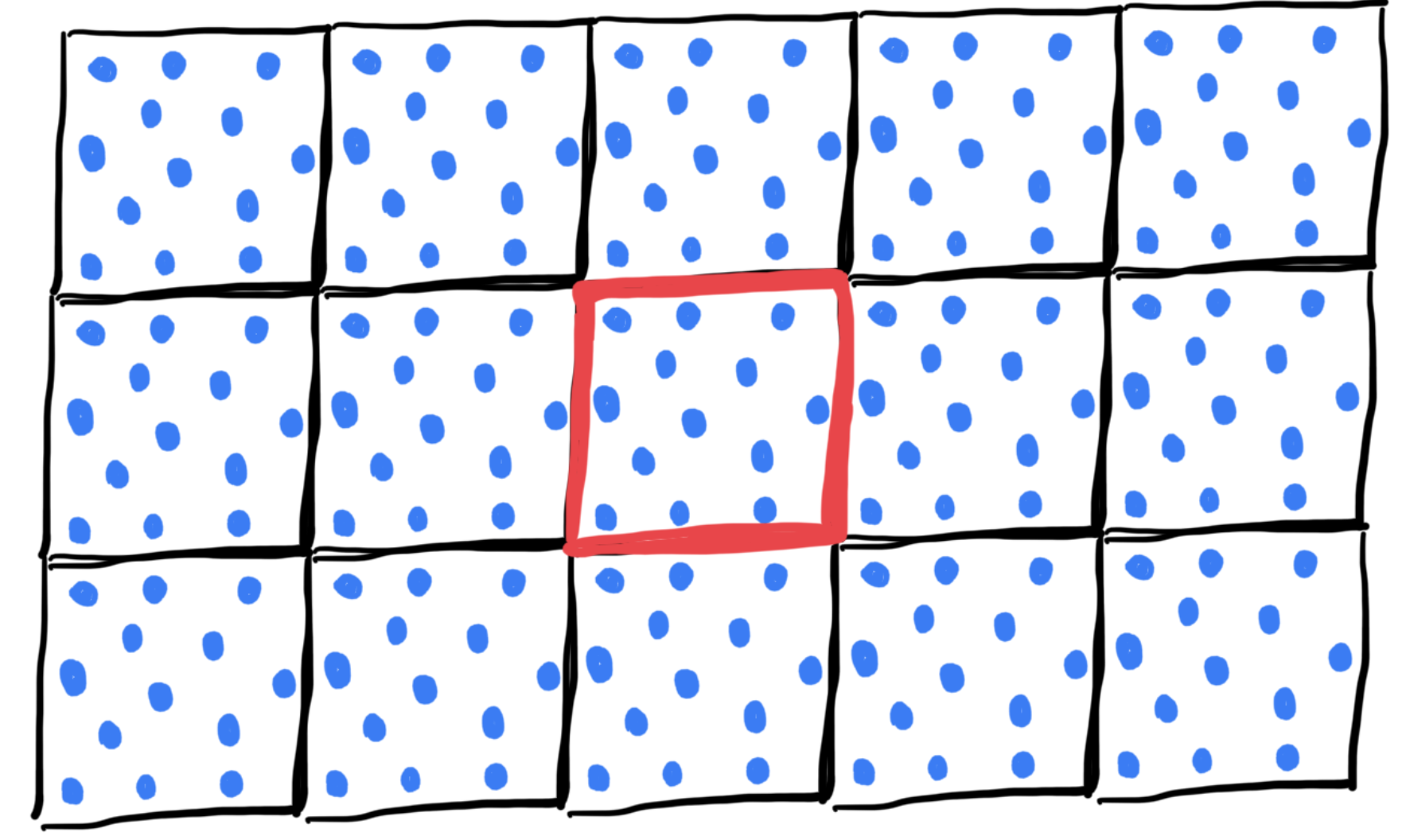
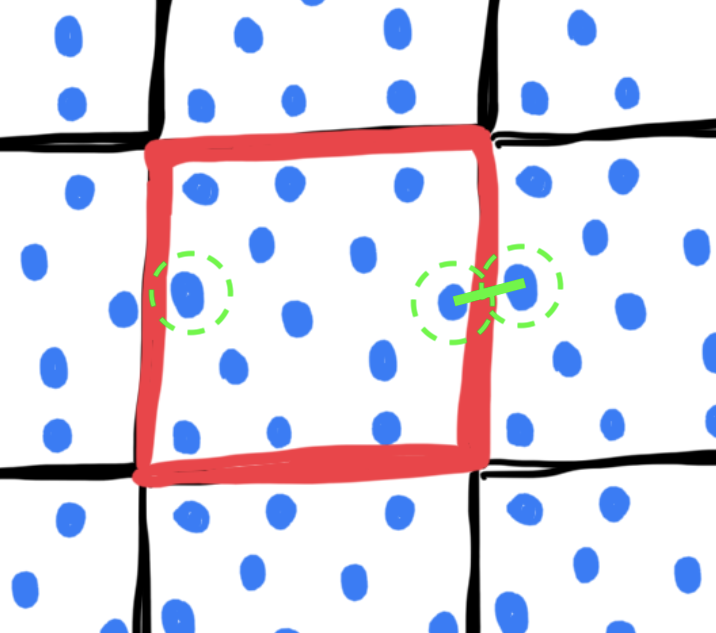
We will use periodic boundary conditions. That means, instead of making hard boundaries that the particles bounce off of, they can exit the box and re-enter at the same time, similar to a piece of paper you roll up:
Specifically, this means that for a particle at the other side of the box (on any axis more than half of the box size away):
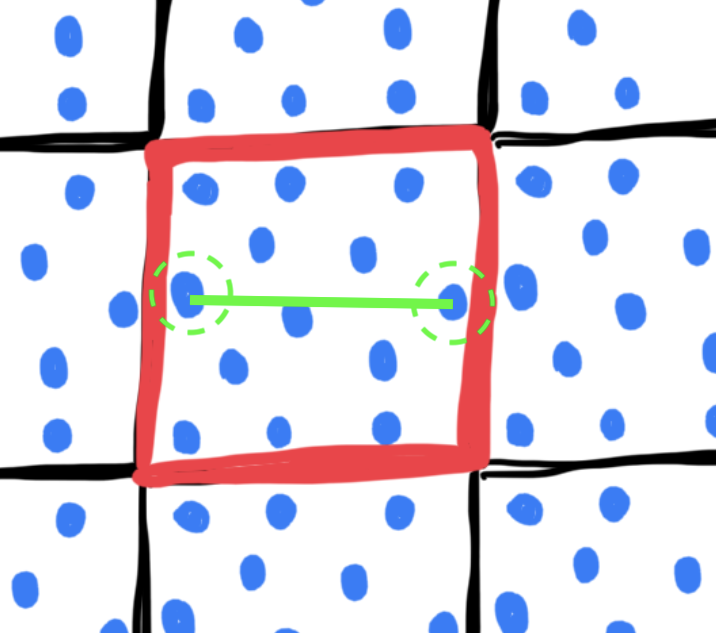
we instead take the “image” of the particle on the other side:
def periodic(coor, l):
for i in range(2):
if coor[i] >= 0.5 * l[i]:
coor[i] -= l[i]
elif coor[i] < -0.5 * l[i]:
coor[i] += l[i]
return coor
def periodic_all(coors, l):
for i in range(coors.shape[0]):
coors[i] = periodic(coors[i], l)
return coors
def soft_sphere(rij_squared):
rij_squared_inv = 1 / rij_squared
rij_six_inv = rij_squared_inv**3
f_val = 48 * rij_six_inv * rij_squared_inv * (rij_six_inv - 0.5)
e_val = 4 * rij_six_inv * (rij_six_inv - 1) + 1
return f_val, e_val
def compute_forces(coors, rcut_squared, l):
n = coors.shape[0]
accels = np.zeros((n, 2))
for i in range(n - 1):
for j in range(i + 1, n):
vect_rij = periodic(coors[i] - coors[j], l)
rij_squared = np.sum(vect_rij**2)
if rij_squared < rcut_squared:
f_val, e_val = soft_sphere(rij_squared)
accels[i] += f_val * vect_rij
accels[j] -= f_val * vect_rij
return accelsWe can now compute forces, and plot them as red arrows (they are currently all zero since the particles are further apart than the cutoff):
accels = compute_forces(coors, rcut_squared, l)
fig, ax = plt.subplots(figsize=(5, 5))
ax.scatter(coors[:, 0], coors[:, 1], s=700, alpha=0.5)
ax.quiver(coors[:,0],coors[:,1],accels[:,0],accels[:,1], color='red')
ax.set(xlim=[-l[0] / 2, l[0] / 2], ylim=[-l[1] / 2, l[1] / 2])[(-5.0, 5.0), (-5.0, 5.0)]/opt/conda/lib/python3.12/site-packages/matplotlib/quiver.py:695: RuntimeWarning: divide by zero encountered in scalar divide
length = a * (widthu_per_lenu / (self.scale * self.width))
/opt/conda/lib/python3.12/site-packages/matplotlib/quiver.py:695: RuntimeWarning: invalid value encountered in multiply
length = a * (widthu_per_lenu / (self.scale * self.width))
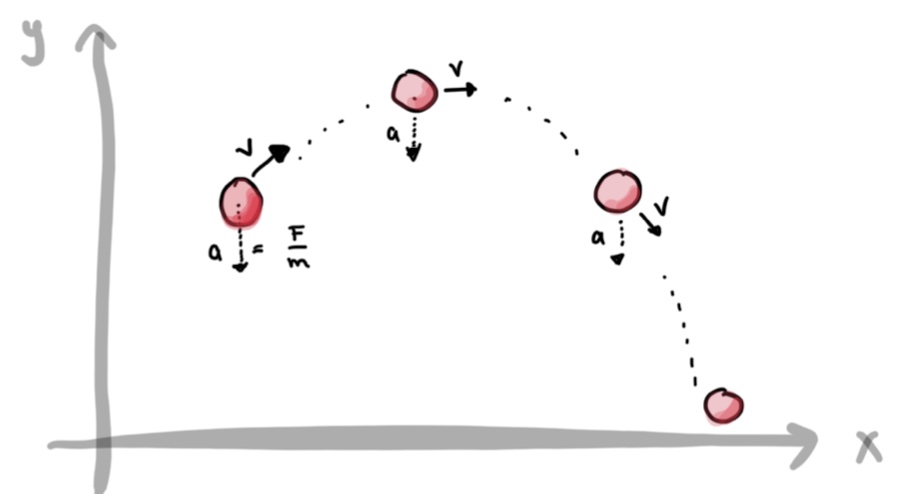
Let us now integrate Newton’s equations of motions, e.g. follow the velocity vector for a very short amount of time to update the positions and then obtain new velocities and forces. We will spend a whole section on integrators, so do not worry about the details here too much, but in principle an integrator works similarly to what is taught at high-school about e.g. throwing a ball: The current position, velocity, and acceleration make up the new position.
def leapfrog_1(r, v, a, dt):
v_new = v + 0.5*dt*a
r_new = r + dt*v_new
return r_new, v_new
def leapfrog_2(v, a, dt):
v_new = v + 0.5*dt*a
return v_new
def single_step(coors, vels, accels, rcut_squared, l, dt):
#step1 leapfrog
coors, vels = leapfrog_1(coors, vels, accels, dt)
coors = periodic_all(coors, l)
#compute forces
accels = compute_forces(coors, rcut_squared, l)
#step2 leapfrog
vels = leapfrog_2(vels, accels, dt)
return coors, vels, accelscoors, vels, accels = single_step (coors, vels, accels, rcut_squared, l, dt)
trajectory.append(coors)
fig, ax = plt.subplots(figsize=(5,5))
ax.scatter(coors[:, 0], coors[:, 1], s=700, alpha=0.5)
ax.quiver(coors[:,0],coors[:,1],vels[:,0],vels[:,1])
ax.quiver(coors[:,0],coors[:,1],accels[:,0],accels[:,1], color='red')
ax.set(xlim=[-l[0] / 2, l[0] / 2], ylim=[-l[1] / 2, l[1] / 2])[(-5.0, 5.0), (-5.0, 5.0)]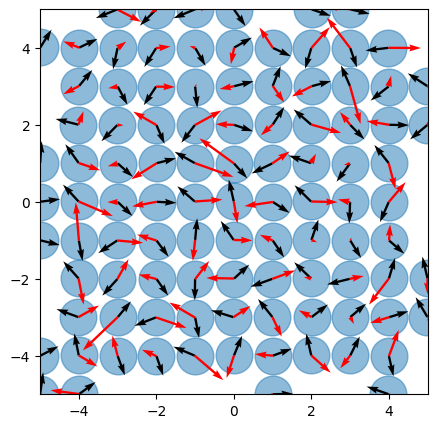
We can see that whereever the spheres of two particles overlap, that there is a strong force away from that overlap. Let us run the simulation for 100 more steps and plot the configuration after the 100 steps:
for i in range(100):
coors, vels, accels = single_step (coors, vels, accels, rcut_squared, l, dt)
trajectory.append(coors)
fig, ax = plt.subplots(figsize=(5,5))
ax.scatter(coors[:, 0], coors[:, 1], s=700, alpha=0.5)
ax.quiver(coors[:,0],coors[:,1],vels[:,0],vels[:,1])
ax.quiver(coors[:,0],coors[:,1],accels[:,0],accels[:,1], color='red')
ax.set(xlim=[-l[0] / 2, l[0] / 2], ylim=[-l[1] / 2, l[1] / 2])[(-5.0, 5.0), (-5.0, 5.0)]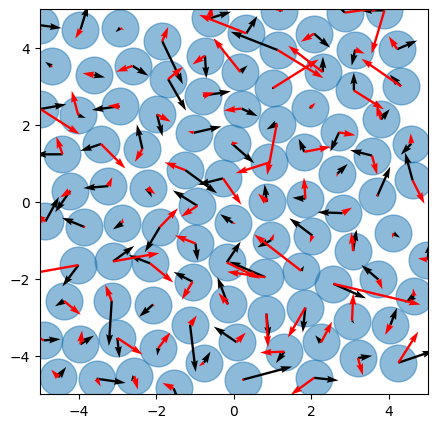
We have now departed from a grid-like structure into a more random, unordered structure. Since the particles cannot leave the box and do not like to overlap, they naturally form a dense packing in 2D, where each particle is roughly surrounded by six other particles.
fig, ax = plt.subplots(figsize=(5, 5))
scat = ax.scatter(trajectory[0][:, 0], trajectory[0][:, 1], s=700, alpha=0.5)
ax.set(xlim=[-l[0] / 2, l[0] / 2], ylim=[-l[1] / 2, l[1] / 2])
def update(frame):
# for each frame, update the data stored on each artist.
x = trajectory[frame][:, 0]
y = trajectory[frame][:, 1]
# update the scatter plot:
data = np.stack([x, y]).T
scat.set_offsets(data)
return scat
ani = animation.FuncAnimation(fig=fig, func=update, frames=len(trajectory), interval=60)
HTML(ani.to_jshtml())